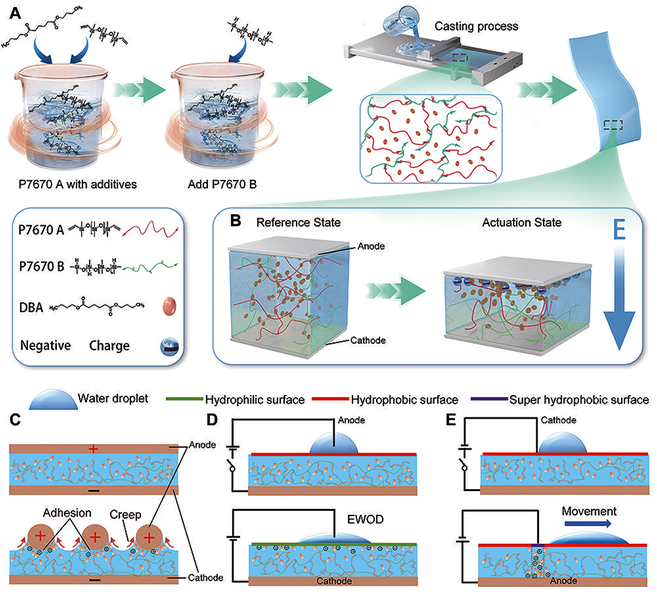
图为聚合物设计与理论原理示意图
近日,由西北工业大学、香港城市大学等单位学者组成的联合团队,提出了一种创新的材料设计策略。该研究通过在介电弹性体材料中引入极性小分子塑化剂的方法,成功开发出一种名为“电活性界面增强介电弹性体”(EIEDE)的新型材料,实现了大应变驱动、强电吸附和可控电润湿效应的集成,展示了介电弹性体材料领域的突破性进展。该研究成果以“Electroactive interface- enhanced dielectric elastomer with ultrahigh electro-adhesion and multifunctio-nal droplet actuation”为题在国际知名综合性期刊《Science Advances》上在线发表。
电活性聚合物是一类能够在电场作用下产生大幅度形变的智能材料,广泛应用于人工肌肉、软体机器人等前沿领域。然而,现有的有机硅介电弹性体通常局限于单一模式驱动,即当前研究主要集中在介电弹性体材料的本征特性上,这严重限制并低估了它们的功能潜力。在实际应用中,材料与其周围环境之间的“界面相互作用”往往是实现多功能化的关键瓶颈。解决介电弹性体材料与外部物质之间的界面相互作用挑战,关键在于对介电弹性体智能界面特性的深入理解。该工作解决了传统介电弹性体的长期局限性,并为柔性驱动、智能吸附和微流控操作提供了变革性解决方案。研究团队首次将大应变驱动、超强电吸附以及多功能液滴操控三大功能集成于单一材料中,为软体机器人、先进制造和微流控技术等领域带来了革命性的应用前景。
研究团队首次报道了使用极性小分子在固—固和固—液界面上实现介电弹性体电活性界面调控的方法。开创性地突破了有机硅弹性体作为电压驱动器的传统限制。通过调控材料表面能,实现了强大的电吸附力和多功能液滴驱动。通过对P7670与EIEDE在平板金属电极和金属网电极上的电吸附性能进行对比实验,结果显示EIEDE在金属网电极上的吸附强度达到31.75kPa,是P7670(0.065kPa)的488倍,并且能够对包括非平整金属片、金属网和金属丝在内的不规则导电材料实现有效的电吸附。这种电吸附技术克服了现有约束,同时扩展了适用性,为机器人技术、工业制造及相关领域的下一代吸附系统提供了创新解决方案。
除了固体界面,EIEDE在固液界面同样表现出色。研究系统性地介绍了材料在电场下的电润湿(EWOD)行为。当液滴接触阳极时,由于小分子塑化剂的迁移富集,材料表面从疏水态转变为亲水态,使得液滴接触角从原始的83.15°急剧减小至9.92°,实现了对液滴铺展程度的极大范围调控,响应能力远超传统介电弹性体。
当液滴接触阴极时,材料表现出相反的“抗电润湿”效应,局部疏水性增强。利用这种极性依赖的特性,通过协同优化阳极几何形状,并利用定制的切割设备配置,研究团队成功实现了液滴的精确二分、三分和四分切割这一技术。利用电润湿诱导的液滴形变、运输、分割和锚定功能,研究团队设计了一个多探针检测的演示实验,实现了多个液滴的锚定与移动。
这些基于EIEDE的独特电润湿特性,通过受控电场梯度操控,实现了预设路径的液滴分割,为先进微流控技术及其应用提供了新策略。研究团队首次展示了对相反电极极性的可切换电润湿响应,为新颖的微流控设计范式铺平了道路。
总体而言,本研究首次通过极性添加剂策略,将大应变驱动、超高电吸附和多功能液滴操控集成于单一介电弹性体材料中,在复杂形状金属吸附、爬壁机器人和微流控液滴控制等领域展现出广阔的应用前景。该研究重新定义了对介电弹性体的基本认知,为未来的相关研究建立了新范式。
(据西北工业大学)