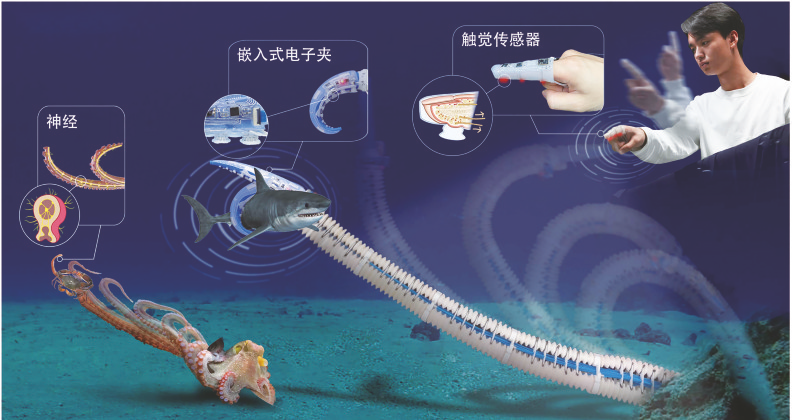
大多数以软体动物为学习对象的能与周围环境进行互动的机器人动作都依赖于“触摸—感知—执行”方法。以章鱼捕捉猎物的运动模式为例,章鱼从根部弯曲手臂开始,弯曲沿着手臂向猎物传播,随后从臂神经节发出简单但独特的肌肉激活前馈波,称为“弯曲传播”。一旦几个吸盘附着在目标上,一个高度灵敏的吸盘神经网络就会发出停止和抓取信号。手臂的远端部分会缠绕在目标周围并接合更多的吸盘,然后引出一个抓取动作,将目标拉向章鱼的嘴巴。
模仿章鱼的这种行为可以为仿生软机器人在与复杂环境交互时的运动和控制模式创建一个有价值的模型,可通过少量输入进行控制具有传感功能的高度变形手臂。北京航空航天大学机械工程与自动化学院的谢哲新及其团队制造了一个电子集成的软章鱼臂(E-SOAM),能够在一个大的领域中到达、感知、抓取和交互,相关成果近日发表于《ScienceRobotics》。
在章鱼弯曲传播的基础上,E-SO-AM使用弯曲—伸长传播模型,以简单而有效的方式移动、到达和抓握。E-SO-AM的远端部分起着抓手的作用,通过集成可承受710%的单轴拉伸和270%的双轴拉伸的液态金属电子电路,可以在高度变形的工作状态下处理弯曲、吸力和温度传感信息,从而在狭窄的环境中自主执行任务。通过将这种传感器化的远端部分与软臂相结合,E-SOAM可以在其原始臂长1.5倍的范围内执行“伸手—抓握—退出”运动,类似于其生物对应物。通过产生吸力的可穿戴手指手套,只需使用一根手指即可远程和交互式地控制机器人在空中和水平面上下进行伸展和抓握。
这一系统可以与人类或者环境进行交互,E-SOAM的研究结果不仅有助于我们理解章鱼手臂的运动功能,而且还为创建可拉伸的电子集成仿生自主系统提供了设计见解。
(彪轶辰)

